

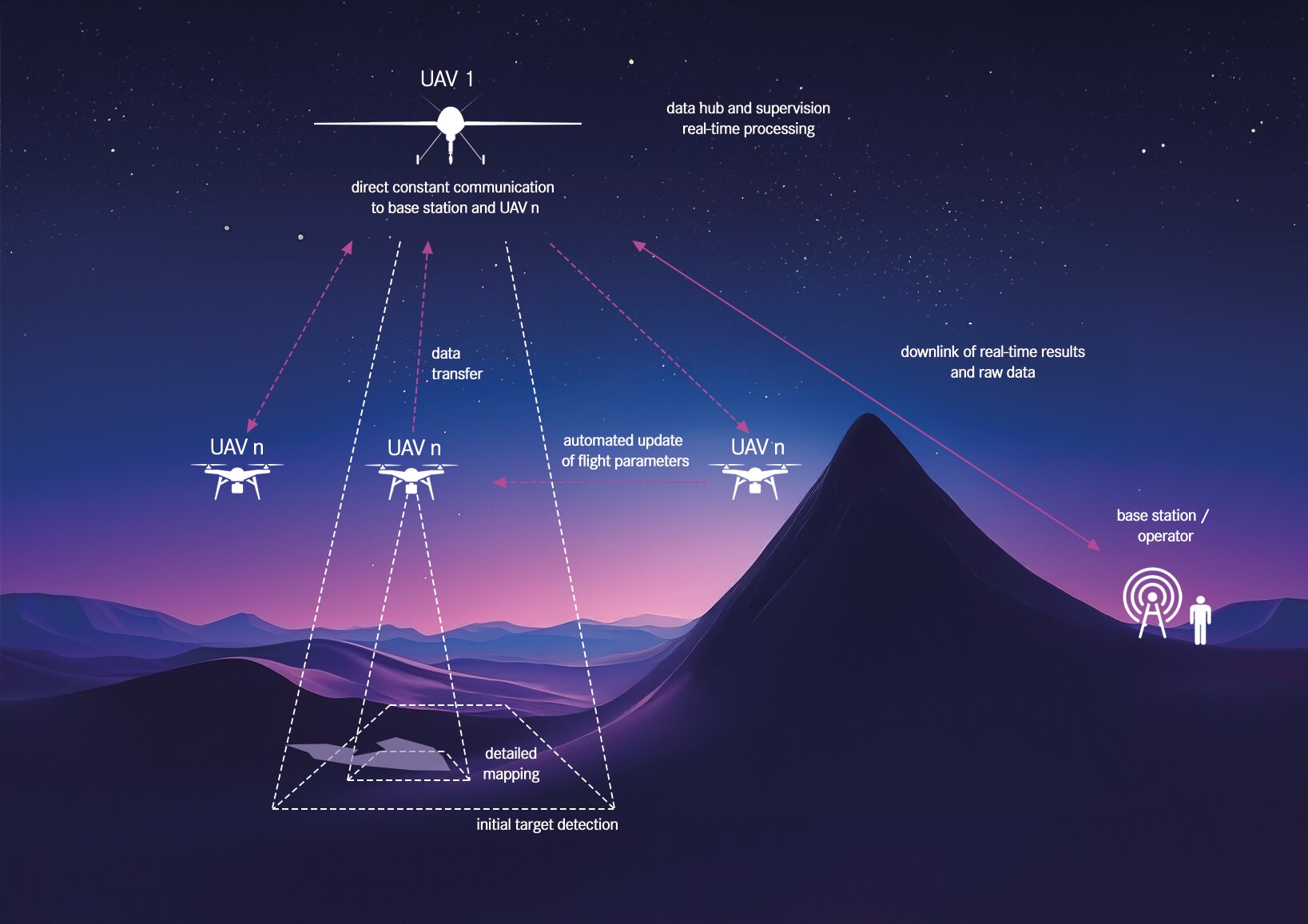
, which maintains constant contact with the base station, and several follow-on drones (UAV n), some of which differ in terms of design. The collected data is processed in the swarm - as is the prioritization and distribution of tasks. The aim is that the swarm fulfills its mission without human intervention. Credit: HZDR/Casus")
Uncrewed aerial automobiles (UAVs), generally often called drones, are omnipresent and have grown in recognition as a consequence of their vast potential use in lots of civilian sectors. Geared up with subtle sensors and communication units, drones can doubtlessly kind a multi-UAV system, additionally referred to as a swarm.
Scientists from the Helmholtz Institute Freiberg for Useful resource Expertise and the Middle for Superior Methods Understanding, each HZDR establishments, performed experimental assessments to arrange a conceptual framework for an autonomous swarm with the precise activity of effectively scanning inconsistently structured environments. The assessments have proven that the developed swarming idea is extra resilient in comparison with others.
The rising curiosity in drones and the will for brand new purposes, but in addition the totally different UAV sizes, which have an effect on flight time and sensor payload, have led to the emergence of drone swarms or multi-UAV methods.
An clever UAV swarm is a fleet of autonomous drones that cooperate based on a selected algorithm in an effort to perform a fancy mission effectively with out human intervention. By having a number of drones working collectively in hierarchical teams, the constraints of particular person UAVs may be overcome in order that many distributed duties may be accomplished directly.
The proposed conceptual framework relies on the leader-followers paradigm, the place the chief drone distributes the duties to the followers.
“Our analysis goals at bettering financial prosperity, social improvement and environmental safety, for instance by mitigating pure hazards, mapping the Earth’s floor to seek out new assets or monitoring the atmosphere,” says Dr. Wilfried Yves Hamilton Adoni, scientist at HIF and CASUS, in regards to the background of multi-UAV methods analysis.
“We modeled numerous obstacles that will happen throughout a swarm mission in an inconsistently structured atmosphere, i.e., an atmosphere the place information-rich, complicated areas alternate with information-poor areas. In comparison with the present UAV swarm configurations accessible, our proposed system is extra resilient as it may possibly shortly get well from system failures.
“We’ve performed the assessments contemplating the present cutting-edge in each digital and actual UAV swarms. They present that our system is dependable, reliable and performs persistently properly. For instance, our method confirms good efficiency by way of power consumption for our situation of huge, inconsistently structured areas,” continues Adoni.
Particularly, in an article printed in October within the journal Drones, Adoni introduced the important thing factors that scientists ought to contemplate when designing an autonomous multi-UAV system for his or her analysis mission. He discusses features resembling chains of command and consensus constructing between the UAVs, communication between the chief and the followers, and the distribution of computations between the UAVs utilizing a selected instance setup.
“We’re at present engaged on an open-source software program framework for a robotic working system that’s significantly appropriate for such swarm missions,” explains Adoni. “The added worth of such a framework is that it incorporates a set of highly effective capabilities which can be related for finishing up autonomous missions in difficult environments.”
Challenges for autonomous swarm missions
The potential of UAVs to achieve inaccessible areas is a vital profit for exploratory missions. Since a swarm may be simply tailored in measurement to cowl a big space in a short while, they’re appropriate for reconnaissance and surveillance missions. The recordings of every UAV may be displayed as 3D visualization in real-time. This enables the operator to realize a sensible mapping of the atmosphere.
However there are additionally challenges. The most typical difficulties to deal with are collision avoidance and impediment detection. Additionally, power consumption and battery life stay main issues. As well as, the authorized necessities for the usage of UAVs differ from nation to nation.
UAV swarms are designed as absolutely distributed methods during which every drone analyzes its personal atmosphere and collaborates with others to hold out particular person actions that collectively contribute to the achievement of an general swarm objective.
The working precept of swarms relies on a household of algorithms that allow every swarm-unit to speak and delegate mission duties, to plan trajectories, and to coordinate flying to effectively obtain the swarm’s general aims. These algorithms usually function in a extremely hierarchical structure, giving the swarm some autonomy at totally different ranges.
Consequently, the human operator’s accountability could also be restricted to fundamental oversight and higher-level engagement with out direct motion.
Extra data:
Wilfried Yves Hamilton Adoni et al, Clever Swarm: Idea, Design and Validation of Self-Organized UAVs Based mostly on Chief–Followers Paradigm for Autonomous Mission Planning, Drones (2024). DOI: 10.3390/drones8100575
Offered by
Helmholtz-Zentrum Dresden-Rossendorf
Quotation:
Clever swarm: Working in a group can be related for drones (2024, November 26)
retrieved 1 December 2024
from https://techxplore.com/information/2024-11-intelligent-swarm-team-relevant-drones.html
This doc is topic to copyright. Aside from any honest dealing for the aim of personal research or analysis, no
half could also be reproduced with out the written permission. The content material is supplied for data functions solely.























{kind=link}